The tool is designed for automatic surface contamination sampling with standardised sampling papers. Engineered exchangeable rubber pad ensures proper contact with the measured object during sampling. In combination with robot force feedback control loop or strain gauge, the force of the contact can be measured, adjusted and declared for different surfaces. The sampling papers can be automatically taken out of vertical buffer by integrated vacuum suction cups and held in place securely by mechanical gripper during measurement (wiping of the controlled surface). The inherent flexibility of the tool enables its use in online or offline automatic measurement systems.
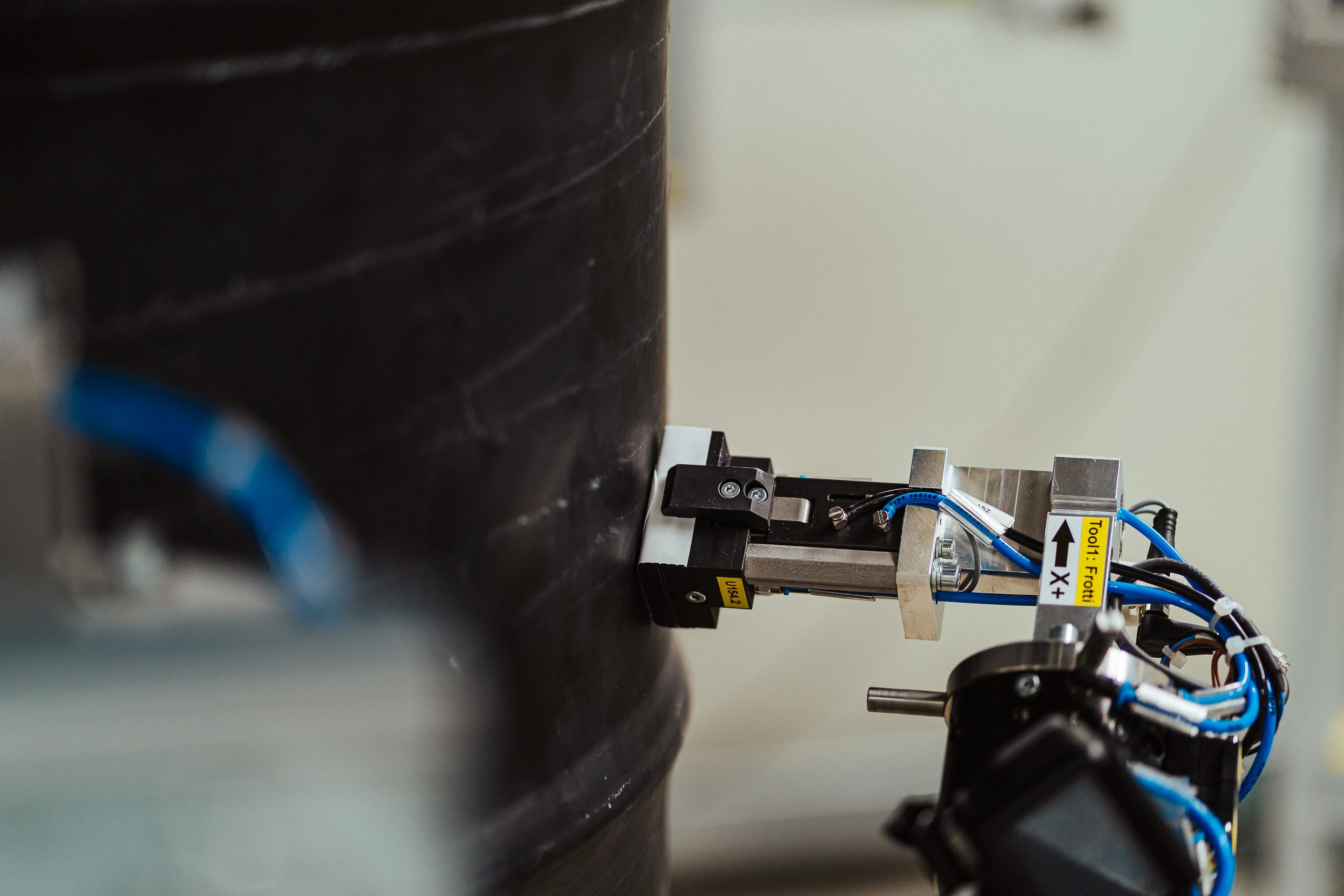
Frottis